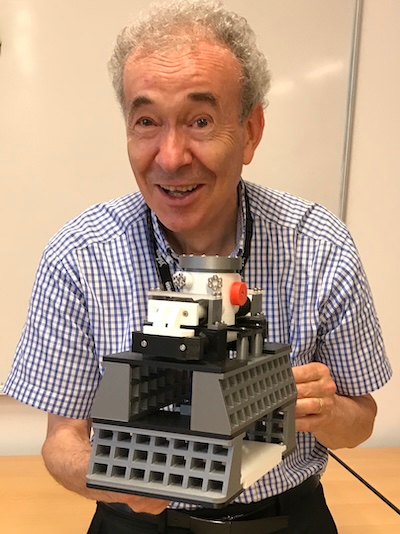
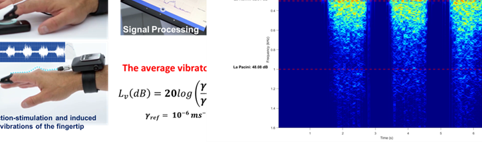
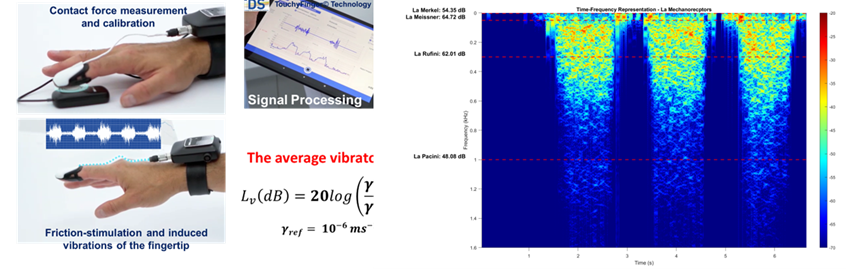
CV :Pour les organismes vivants, détecter les forces mécaniques est d’une importance capitale pour interagir avec le monde physique. La mécano-transduction définie comme la transformation d’un stimulus mécanique en une réponse biologique, constitue la base de nombreuses fonctions physiologiques fondamentales dont le toucher, et contribue à l’intégrité et à la survie des organismes. Chez l’homme, la mécano-sensation cutanée, ou sens du toucher, permet de détecter et de différencier de multiples stimuli mécaniques environnementaux : vibration, texture, pincements, étirements cutanées. Ce sont les neurones du système somato-sensoriel qui contrôlent cette modalité. Leurs corps cellulaires situés dans les ganglions rachidiens dorsaux, envoient des prolongements vers la peau. Chaque terminaison possède des récepteurs nerveux spécialisés sensibles aux forces mécaniques (mécanorécepteurs) qui transforment les différentes forces mécaniques en signal électrique spécifique pour générer des potentiels d’action chargés de propager l’information jusqu’au système nerveux central. Ce sujet a connu ces dernières années un développement important au niveau national et international. Le but ultime est de mettre au point des approches scientifiques pour quantifier et comprendre les signatures pertinentes de l’interface peau humaine / texture, où pulpe du doigt sur peau humaine. Cette recherche se situe à l’interface des disciplines que sont la texturation des surfaces, les revêtements, la métrologie, la rhéologie des matériaux, la mécanique du contact, la tribologie, la vibro-acoustique et les neurosciences. Dans ce cadre, au sein du laboratoire de Tribologie et Dynamique des Systèmes, UMR CNRS 5513 (LTDS), nous avons développé depuis une vingtaine d’année des technologies haptiques instrumentées spécifiquement conçues pour modéliser et caractérisant la perception tactile. Le dernier dispositif développé « TouchyFinger », basé sur l’équipement de la pulpe du doigt avec un capteur de force et un capteur de vibration. Le système est muni d’un analyseur du spectre de vibration et permet de quantifier l’intensité, la fréquence et la longueur d’onde dans les quatre mécanorécepteurs de la pulpe du doigt. Avec une analyse temps-fréquence, TouchyFinger permet de représenter l’intensité vibratoire et la fréquence fondamentale dans chaque bande de fréquences des mécanorécepteurs, figure (1). Ces informations issues de la mécano-transduction ont permis de quantifier l’effet des textures et le raideur des matériaux sur la sensibilité des mécanorécepteurs. Une étude sur l’effet du vieillissement sur l’acuité tactile des mécanorécepteurs, a permis de montrer la perte de sensation lors du vieillissement. |


 Actualités
Actualités